Processing es un lenguaje interesante para iniciarse a la programación.
He encontrado un examen que preparé en el curso 2017/18 para alumnos de segundo de bacillerato.

El primero de los dos ejercicios 10 debe quedar así
Processing es un lenguaje interesante para iniciarse a la programación.
He encontrado un examen que preparé en el curso 2017/18 para alumnos de segundo de bacillerato.
El primero de los dos ejercicios 10 debe quedar así

DISEÑO
El diseño de este taburete se basa en el cuadrado. Está compuesto de tres piezas principales: una central y dos laterales, que son cuadrados. Una cuarta pieza, el travesaño, sirve para darle rigidez.
La unión de las piezas es mediante tornillos. Se ha intentado utilizar el mínimo. Se necesitan siete tornillos.
Otra de las características de este diseño es que se pueden acoplar por parejas ocupando poco espacio. Para facilitar este acoplamiento hay que modificar ligeramente el diseño alargando unos milímetros en una dimensión los cuadrados. 3 mm pueden ser suficientes.
 |
| Dos taburetes acoplados |
 |
| Modelado del interior |
Diseño modificado para facilitar el acoplamiento
MATERIAL

Como la madera empleada no es de mucha calidad, las dimensiones no suelen ser muy precisas. En las medidas del taburete se debe primar que las piezas sean cuadrados a que se ajusten a las dimensiones de los planos. Es decir, si nuestra tabla mide 19,6 cm las dimensiones de los cuadrados tendrán ese lado, o 19,6 x 19,9, en el caso que queramos que los taburetes se puedan acoplar por parejas sin dificultad.
Los tornillos pueden ser de 40 x 4 mm o un poco más largos, dependiendo del espesor de la tabla. Para preparar el taladro donde se introduce el tonillo usaremos una broca de 3,5 mm.
Una vez terminado he utilizado aceite de linaza para proteger la madera.
EJECUCIÓN
Además de alargar en una dirección, el cuadrado 3 mm para facilitar el acoplamiento de los taburetes por parejas, conviene, con ayuda de un sargento montar el taburete antes de hacer los taladros longitudinales en las maderas. Así podremos hacer las correcciones que sean necesarias para que el taburete asiente bien en el suelo y no 'cojee'.


Esta entrada está relacionada con esta otra. La novedad es que incluye un semáforo que indica cuando se puede pasar. El control del semáforo se resuelve sin añadir un final de carrera adicional. El semáforo actúa así:
MATERIAL ELÉCTRICO NECESARIO
La fuente de alimentación se puede obtener de un cargador de teléfono móvil que ya no se utilice.
 |
| Conmutador doble |
Para este tipo de proyectos es básico que el mecanismo funcione bien, por lo que antes de pasar al circuito eléctrico debemos asegurarnos del correcto funcionamiento del mecanismo.
Para facilitar esta parte del proyecto es útil aprovechar, como he hecho en esta ocasión, dispositivos que podríamos llamar de desguace. Para este proyecto he utilizado un lector de CD. Para adaptarlo al proyecto solo es necesario estudiar donde colocar los finales de carrera y añadir lo que necesite la puerta para activarlos.

Los tornillos que he utilizado

En el esquema eléctrico he detallado las cuatro fases en las que puede estar. En cada una cambia el conmutador doble o alguno de los finales de carrera.
FOTOS Y VIDEO
Vídeo por la parte posterior en el que se aprecia como interactúan los finales de carrera con la puerta.




Fotos antes de poner los cables

Foto con cables.
PLANOS
Planta, plata sin cotas, soporte del semáforo.
Polux es un robot estático, que cuenta con algunos componentes básicos para practicar con arduino. Estos componentes son
Es una variedad de los componentes que se pueden usar con ardiuno, pero solo uno de cada, para que el montaje del robot sea sencillo.
Se utiliza un motor con reductora lo que ahorra el tener que construirla. El eje de salida del modelo utilizado es muy corto. Se consigue alargarlo utilizando un rotulador usado que se ajusta al eje de salida del reductor con un trozo de bolsa de plástico para que entre a presión.
Para controlar el motor será necesario el puente en H utilizado en otra entradas de este blog, el L9110S.
La polea se ha hecho con una rodaja de tubo de cartón. El eje sobre el que gira es un cuadradillo de madera de 6 mm. También se pueden utilizar brochetas u otros cilindros de madera o metal.
La dimensiones de los elementos de madera pueden variar respecto de las que se representan en los planos. La base sobre la que se ha montado mide 270 x 130 mm². Se adjuntan planos a escala natural.
VIDEO
En el video se ve una de aplicación avanzada que se puede hacer con Polux. Pero se debe empezar por cosas más sencillas para ir cogiendo confianza.
FOTOS


PLANOS
Planta, alzado, soportes, polea, plantilla con números.
UTILIZACIÓN DIDÁCTICA.
Una de las ventajas de Polux es que funciona alimentado por el USB del ordenador, no necesita baterías adicionales. Esto permite probar los programas nada más transferirlos del ordenador a arduino y en función de los resultados hacer las correcciones que pudiesen ser necesarias.
PROGRAMAS
Los programas se pueden ser de dificultad creciente.
PROGRAMAS SOLO CON SALIDAS
Intermitencias con el LED
Control del sentido de giro del motor. Gira un tiempo en un sentido, en otro sentido, se detiene.
PROGRAMAS CON ENTRADAS Y SALIDAS
El LED responde a toques del pulsador: Se enciende mientras está pulsado. Se queda encendido al pulsarlo y se apaga cuando se vuelve a pulsar.
El motor responde a toques del pulsador: Gira en un sentido y en otro, se detiene.
El motor responde a toques del pulsador y al final de carrera. Lo que permite controlar que se detenga frente a determinados números de la polea.
EJEMPLO DE PROGRAMA
//MOVIMIENTO DEL MOTOR SIN ENTRADAS
#define IN1 3
#define IN2 5
#define VELOCIDAD 150
#define TIEMPO 4000
void avanza(){
analogWrite(IN1,0);
analogWrite(IN2,VELOCIDAD);
}
void retrocede(){
analogWrite(IN1,VELOCIDAD);
analogWrite(IN2,0);
}
void para(){
analogWrite(IN1,0);
analogWrite(IN2,0);
}
void setup() {
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
//pinMode(IN3,OUTPUT);
//pinMode(IN4,OUTPUT);
para();
}
void loop() {
avanza();
delay(TIEMPO);
para();
delay(TIEMPO/2);
retrocede();
delay(TIEMPO);
para();
delay(TIEMPO/2);
}
POLEAS
Se trata de poleas para utilizar en transmisiones de polea correa. Los apoyos del eje de la polea en el soporte son de plástico, para reducir el rozamiento y por su flexibilidad para facilitar la colocación y el cambio de las correas.
La polea se hace con una rodaja de tubo de cartón y con tapas también de cartón. el eje es un palillo de dientes o una brocheta. En el caso de un tren de poleas, si la polea es de las más alejadas del motor es necesario regruesar el eje con una tira de papel, para evitar que la correa resbale.
El eje de de la polea debe entrar con holgura en el soporte para que pueda girar bien. El tamaño de las gomas que hacen de correa es crucial ya que si son muy pequeñas ejercerán mucha tensión y dificultarán el movimiento.
El soporte de la polea se fija con un solo tornillo para facilitar su alineación.
Los taladros para el eje de la polea se pueden hacer con una troqueladora de las que se usan para encuadernar con gusanillo de alambre.
Las dimensiones pueden variar, dependiendo principalmente del diámetro de la rodaja de cartón.
Los trocitos de madera que sujetan el plástico, pueden ser más altos, para limitar el movimiento lateral del plástico.
Los tornillos de 2,5 mm de diámetro resultan muy prácticos, ya que al ser tan finos no hacen necesario que se taladre previamente los listones para que no se agrieten.

FOTOS
 |


Como se ve en la foto de arriba, con varias poleas se puede hacer un tren de engranaje. La construcción de poleas sueltas facilita la división del trabajo en trabajos en equipo, y la alineación de cada polea en el montaje.
Para reducir el tamaño del conjunto se pude hacer un tren de poleas o reductor de velocidad como en que se muestra. Los materiales utilizados son los mismos que en la polea. La dimensiones como siempre, vendrán determinadas por el tamaño de las rodajas del tubo de cartón que utilicemos.

FOTOS DEL REDUCTOR



VIDEO
En esta entrada se obtiene la ecuación del hiperboloide que se presenta en esta otra entrada del blog.
Obtenemos la ecuación más sencilla, que corresponde al hiperboloide que hay del aro de hierro más grande hacia arriba. Como eje Z se elige el eje del hiperboloide y como origen de coordenadas el que está a la altura de la parte más estrecha del hiperboloide.
La ecuación del hiperboloide en este caso viene dada por:

El valor de a viene dado por la mínima distancia entre la recta eje del hiperboloide y cualquiera de las generatrices del mismo. En el siguiente dibujo están acotados todas las distancia necesarias para realizar los cálculos y el resultado de los mismos.

Con estos datos el siguiente punto pertenece al hiperboloide:
x= 2400; y= 0; z=2196
Introduciéndolo en la ecuación del hiperboloide, en la que ya conocemos a=b=1180 se obtiene c que es 1240.
Y la ecuación del hiperboloide queda:
CÁLCULOS MÁS DETALLADOS
 |
| Figura 1 |
En la figura 1 se representan la circunferencia superior, la más grande y el eje del hiperboloide en azul.
El triángulo naranja son los datos de que disponemos: Los lados más pequeños son los radios de las circunferencias, que además sabemos que forman un ángulo de 135º. El lado mayor sería la proyección horizontal de la generatriz del hiperboloide. En el siguiente dibujo se utilizan letras mayúsculas para los vértices del triángulo y las minúsculas correspondiente para el lado opuesto a cada vértice

En el triángulo amarillo el cateto horizontal sería d y el vertical la distancia entre las circunferencias, es decir 6650. Mediante semejanza de triángulos, una vez que hemos calculado g, obtenemos la altura a la que se encuentra el origen de coordenadas.

La altura a la que se encuentra el origen de coordenadas queda definida por el rectángulo verde de la figura 1, es su lado mayor. El lado menor es la distancia entre las recta eje y generatriz del hiperboloide, es decir a.
Valores calculados:
a=1180; d=6329; g=4239; Altura de origen de coordenadas =4454.
Todas las longitudes en mm
OBSERVACIONES
La hipotenusa del triángulo amarillo en la figura 1 define la inclinación de las asíntotas de la hipérbola que genera al hiperboloide por rotación al rededor de su eje. Para que esta hipérbola sea equilátera la inclinación de las asíntotas tiene que ser de 45º.
Cuando se diseñó el hiperboloide no se tenían estos conocimientos, pero casi se obtuvo una hipérbola equilátera, ya que el ángulo es de 46º.
Un hiperboloide similar al construido pero equilátero sería por ejemplo éste.
Esta estructura es la base para varios proyectos, más concretamente un ascensor o una puerta corredera.
Está diseñada siguiendo los objetivos de que sea sencilla, de reducir el rozamiento y de facilitar la colocación de los sensores de posición, es decir de los finales de carrera.
La dimensión principal de este proyecto, su largo, se deriva de la que resulta al dividir una varilla roscada comercial, que mide 1 m, en seis partes.
MECANISMO TUERCA TORNILLO.
El mecanismo principal es el de tuerca tornillo que se materializa con varilla roscada de métrica 6. Para reducir el rozamiento en los puntos de apoyo de la varilla se han utilizado arandelas de ala estrecha que tienen, las utilizadas, un diámetro exterior de 12 mm. También se reduce el rozamiento colocando unas púas para evitar el desplazamiento longitudinal de la varilla.
Es necesario rodear con cinta adhesiva la parte de la rosca que está en contacto con la arandela.
MECANISMO POLEA CORREA

SOPORTE DEL MOTOR
El soporte es un trozo de madera con un taladro un poco más grande que el diámetro del motor. Se coge a la estructura principal con un solo tornillo. De este modo permite darle una pequeña inclinación que evita que la goma se salga del eje del motor,
TUERCA

Este mecanismo impide el giro de la tuerca. El listoncillo por un extremo toca los finales de carrera. Por el otro extremo se le pueden acoplar los accesorios que requiera el proyecto, por ejemplo, la cabina de un ascensor.
ESTRUCTURA PRINCIPAL

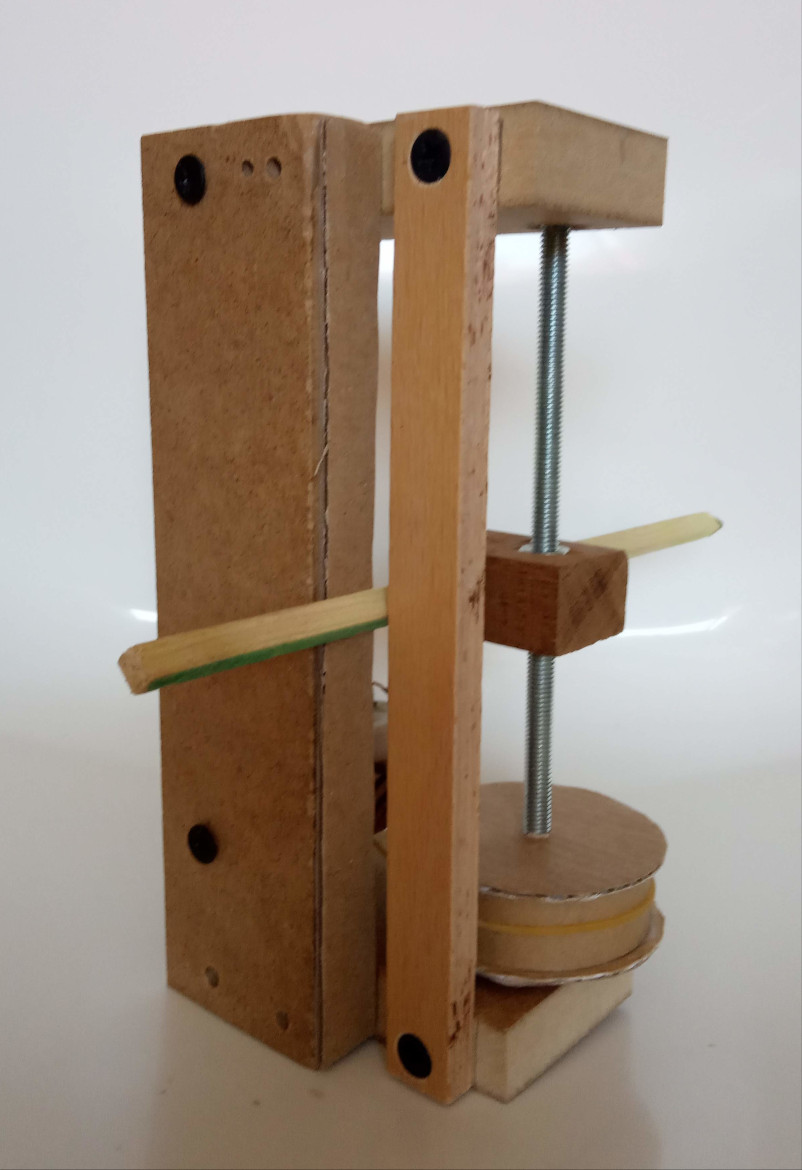
La estructura principal está formada por un pilar y dos tacos en los que se apoyan los extremos de la varilla, además de un listón que materializa junto con el pilar el raíl por el que se desplaza el listoncillo cuadrado del apartado anterior.
El taco inferior se puede pegar al pilar y el superior se coge con un solo tornillo, así se pude girar, facilitando en desmontaje de la varilla.
PLANOS
 |
| Vistas inferior, lateral y superior |
 |
| Prespectivas |

 |
| Fases de montaje |
 |
| Imágenes superior e inferior |


 |
| Vista posterior |

 FOTOS
FOTOS |
| Áncora |



 |
| Vista posterior |
 |
| Áncora |


{kind=link}